








In Canada, about 13.7 per cent of individuals aged 15 and over report having mobility disabilities, requiring the use of assistive devices such as canes and wheelchairs to walk or climb stairs. Despite their widespread use, these traditional tools have limitations as they can cause physical strain, restrict terrain navigation, and pose daily accessibility challenges.
To address these issues, Carleton University researcher Mojtaba Ahmadi is designing advanced exoskeletons – wearable robotic devices powered by artificial intelligence (AI). These exoskeletons aim to provide assistive force for walking and daily activities while addressing the limitations of traditional assistive devices – offering improved mobility and accessibility for individuals with disabilities in Canada and beyond.
“Exoskeletons can help people stand up and walk, they can help with posture,” says Ahmadi, a professor in Carleton’s Department of Mechanical and Aerospace Engineering. “If the device is strong and smart enough, it’s an excellent way for people with disabilities to regain function and autonomy.”

Mojtaba Ahmadi, Carleton University mechanical engineering professor
Advancing Traditional Exoskeletons with AI
Robotic exoskeletons emerged in the 1960s, primarily for military and industrial uses. It wasn’t until the late 2000s that significant advancements were made, leading to their development for medical and rehabilitation purposes.
Despite their improvements, many exoskeletons still do not adapt well to the user’s intentions, leading to awkward or inefficient movements. This can result in injury or accidents if the exoskeleton applies too much force or moves in an unexpected way.
In Carleton’s Advanced Biomechatronics & Locomotion (ABL) lab, Ahmadi and his research team are programming the next generation of robotic exoskeletons using AI so that they seamlessly cooperate with users.
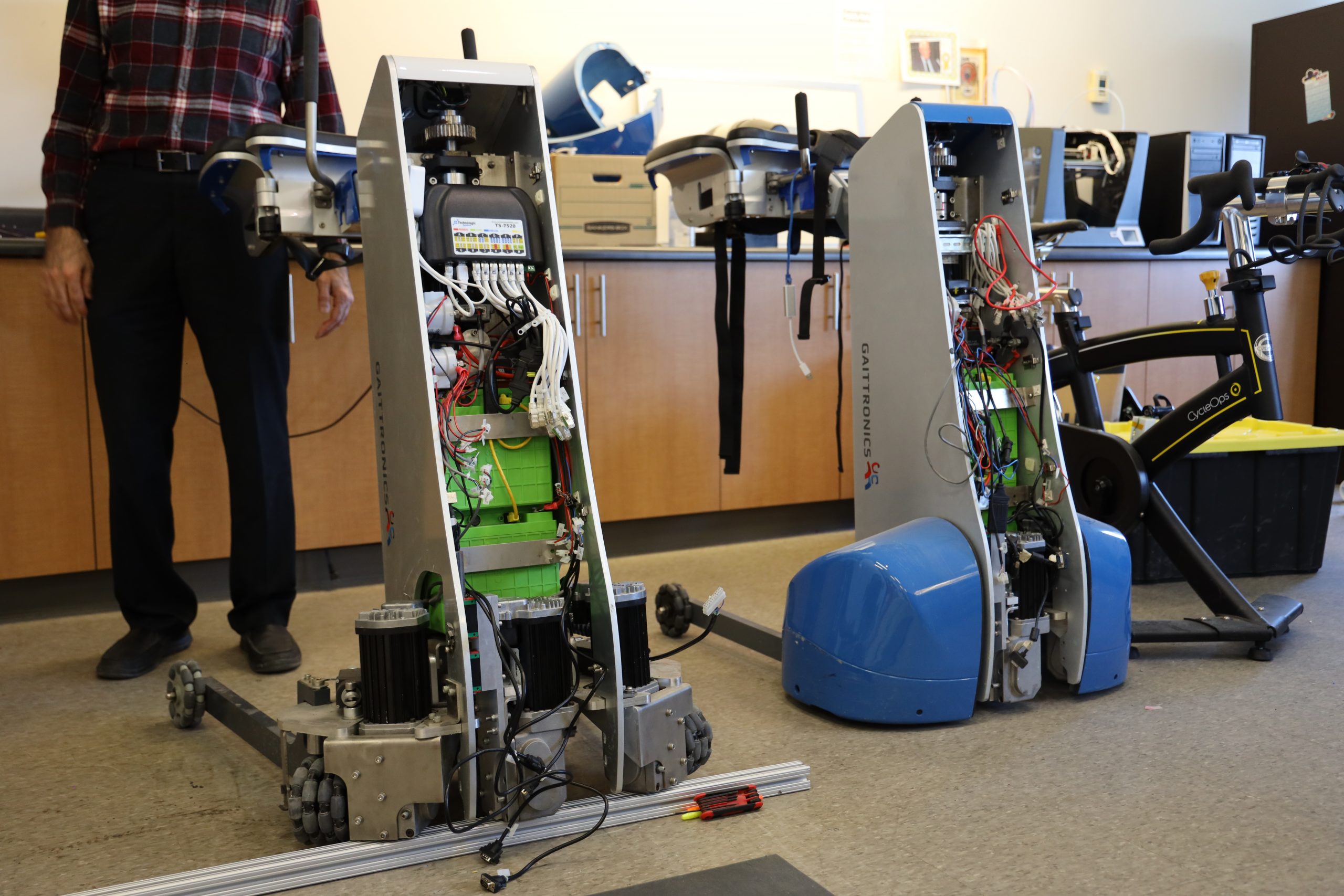
A prototype of a walking device built in the ABL lab
“The objective is to try and develop controllers based on body signals that would require the least amount of pre-planning,” Ahmadi explains.
“The robot uses machine learning to detect the load you are carrying, predict what you are doing, and adapt to helping you with the task.”
To achieve this level of machine intelligence, Ahmadi’s team is using sensor technology to gather data about individual’s movements. This involves attaching electrode sensors to a person’s skin over various muscles and having them perform every-day tasks.
The sensors detect and record the user’s movements by picking up small voltages and categorizing them with a specific task. Using the data collection from this stage, Ahmadi’s team can program the exoskeleton to understand what a person’s movements mean.
“We have to ensure that the robot helps the user but not too much,” Ahmadi explains.
“For someone who has a bit of function or strength, it’s not a good idea to provide all the effort that is needed to perform a task. Otherwise, muscles and bones start the to get smaller and weaker.”
This delicate balance is what Ahmadi refers to as regulated assistance.
“Everyone’s bodily cues are different,” he says. “Exoskeletons should be tailored to meet each user’s unique needs.”









